Спрос на электромобили будет увеличиваться в среднем на 38% ежегодно, согласно прогнозу по развитию рынка электромобилей в России. Соответствующие данные предоставили аналитики из консалтинговой компании Strategy Partners.
26–27 марта 2024 года в конференц-зале ЦВК «Экспоцентр» (Москва) прошла ежегодная научно-практическая конференция «Российский рынок систем электрохимического накопления электрической энергии и батарейных систем электротранспорта. Проблемы и перспективы». Эксперт «РТСофт-СГ» выступил с докладом о комплексном подходе к проектированию развития инфраструктуры заряда электротранспорта.
H. R. Pota *, M. J. Hossain **, M. A. Mahmud ***, R. Gadh ****, R. C. Bansal*
Значимой особенностью новейших энергосистем, интегрирующих в состав своих энергетических ресурсов возобновляемые источники энергии (ВИЭ), характеризующиеся существенной нерегулярностью и слабой предсказуемостью электроэнергетического режима, является способ подключения этих источников к электрической сети посредством конверторных систем. Элементной базой этих конверторных систем являются управляемые устройства силовой электроники.
Для энергосистемы инверторы, посредством которых распределённые энергетические ресурсы подключаются к электрической сети, являются генераторами нового типа, которые можно назвать инверторными генераторами.
В отличие от привычных генераторов, реализуемых в виде синхронных (или подобных им вращающихся) электрических машин со всеми своими системами автоматического управления, инверторные генераторы не обладают инерцией вращающейся массы, не реагируют «в автомате» на изменение глобального системного параметра электрического режима – частоту, а также имеют ряд других особенностей. Новые свойства распределённой генерации обостряют проблемы управления электроэнергетическими режимами энергосистемы в нормальных стационарных и переходных режимах.
Нижеследующий перевод статьи международного коллектива авторов позволит лучше понять проблемы управления мироэнергосистемами с инверторными генераторами в автономном (островном) режиме, а также поможет сориентироваться отечественным экспертам при разработке собственных интеллектуальных систем автоматического управления.
Реферат: Эта статья содержит схемы управления распределением мощности в островных микроэнергосистемах с распределёнными энергоресурсами, присоединёнными посредством инверторов {далее инверторные генераторы1}, поддерживающие комбинированное управление по жёстким {или робастным2} и адаптивным {в соответствии со статизмом} законам.
Поскольку нагрузка микроэнергосистемы меняется, инверторные генераторы {имеются в виду инверторы, присоединяющие ВИЭ к сети переменного тока} делят изменения нагрузки между собой; в работе показано, что неконтролируемое распределение нагрузки между инверторными генераторами будет носить случайный {произвольный} характер, а метод управления по статизму приведёт к регулируемому изменению генерации.
Эта статья включает в себя базовую информацию о схемах управления распределением мощности и выделяет трудности точного распределения реактивной мощности. Производительность предлагаемого контроллера {органа управления} продемонстрирована с использованием тестовой модели микроэнергосистемы.
1. Введение
Присоединение Microgrid {к энергосистеме} является практическим путём для достижения наиболее полного использования возобновляемых ресурсов {ВИЭ}, сокращения потерь энергии при передаче, понижения уровня капиталовложений и достижения более высокой надёжности электроснаб- жения (Лассетер, 2002, 20113). Для проверки основных идей были разработаны экспери- ментальные микроэнергосистемы (Лассетер и др., 2011).
Как ожидается, источниками энергии Microgrid {MG} могут быть ВИЭ, присоеди- нённые через конверторы типа источник напряжения (VSC). Большинство VSCs управляют выходными модулем и фазой напряжения (вектором напряжения). Это отличает MG от систем, базирующихся на синхронных машинах, где модуль и скорость изменения угла (частота) напряжения устанавливаются в результате динамического взаимодействия между генерацией и нагрузкой. Как показано далее, если выходные модуль и угол напряжения VSC не управляются, режим MG будет результатом непланируемых {произвольных} уровней генерации и профилей напряжения (Лассетер, 2011). Существует богатая литература, посвящённая вопросам распределения мощности между параллельно работающими инверторами (Де Брабандер и соавторы, 2007). Она даёт общее представление о статическом управлении {в отличие от астатического} распределением активной мощности как об управлении частотой по статизму.
Статическое регулирование частоты спроектировано таким образом, что выход {напряжение} каждого инвертора имеет различную частоту. При работе энергосистем предполагается, что существует единая установившаяся частота, поэтому выход каждого инвертора на различных частотах не имеет смысла. {Зато используется свойство дифференцированно изменять активную нагрузку каждого инверторного генератора при изменении единой частоты.}
В данной работе статическое управление частотой изложено в терминах фазового угла выходного напряжения инверторов.
На сегодняшний день быстродействующие инверторы способны быстро изменять фазу выходного напряжения и это является более значимым фактором для управления распределением мощности, чем скорость изменения угла (то есть чем частота). Последние обзорные статьи (Герреро и соавторов, 2013 а,б) содержат полезную базовую информацию о MG и широкую библиографию. Обзор экспериментальных MG представлен в работах Лидула и Раджапаксе, 2011.
Распределение реактивной мощности в MG затруднено вследствие того, что обычный метод разделения, основанный на поддержании напряжения на генераторе, не работает в MG (Джонсон и др.,. 2011).
Некоторые решения для распределения реактивной мощности из литературы рассмотрены в данной работе. Большинство публикаций о MG рассматривает источники напряжения за инверторами как идеальные источники напряжения. (2002 Лассетер,, 2011, de Brabandere и соавт., 2007).
Это предположение вполне допустимо для исследования распределения мощности между параллельно соединёнными инверторами (Де-Брабандер и соавт,. 2007), но оно нуждается в расширении для случаев, когда идеальные источники напряжения заменяются возобновляемыми источниками энергии. Представленный в данной статье материал написан с позиций энергетической системы и с акцентом на MG.
Сделан чёткий вывод о том, что статическое управление по скорости изменения фазового угла напряжения {по частоте} требует изменения входной мощности и для достижения этой цели необходим другой контроллер.
В следующем разделе представлен анализ, который выявляет необходимые элементы алгоритмов управления для распределения энергии между ВИЭ MG.
2. Распределение мощности без управления
Анализ MG c двумя источниками поучителен для получения базового понимания работы MG и исследования проблемы. Большинство ВИЭ присоединены к MG с использованием инверторов.
Инвертор, подключающий генератор энергии, может быть смоделирован как источник напряжения с управляемым модулем и фазовым углом напряжения (Коэльо и соавт., 2002; Johnson и соавт., 2011). На рис. 1 показан MG с двумя источниками напряжения и одной резистивной (активной) нагрузкой. Параметры источников напряжения V1, δ1, V2, δ2 могут управляться независимо. В данной работе предполагается, что инверторы работают быстро и в статорах генераторов нет никаких переходных процессов.
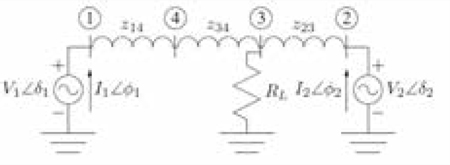
Рис. 1. Простой MG
Параметры линий электропередачи MG на рис.1:
Z14 = 0,0+j0,05 pu, Z34 = 0,0+j0,2 pu, Z23= 0,0 + j0,05 pu.
Узел 1 является узлом типа PV: P1 0 = 0,5 pu, V1 = 1 pu, узел 2 является балансирующим: V2 = 1 pu, δ2 0 = 0°, и резисторная нагрузка равна: RL = 1 p u; начальные приближения величин δ1, V3, и δ3, полученные с помощью расчёта установившегося режима, равны: δ0 = 5,7663°, V3 = 0,9984 pu, δ3 = – 4,258°. Чтобы увидеть эффект от изменения нагрузки, изменим сопротивление RL = 0,5 pu. Пусть источники напряжения удерживают модули и фазовые углы напряжения на уровне вышеуказанных начальных значений.
Для данного удержания начальных параметров величины активных и реактивных мощностей источников питания должны измениться следующим образом: P1 = 0,6616 pu, P2 = 1,3190 pu, Q1 = 0,0740 pu,Q2 = 0,1247 pu и PR 0 L = 1,9805 pu. Это означает, что ΔP1 = P1 – P1 0 = 0,1616 pu и ΔP2 = P2 – P2 0 = 0,8221 pu; из этих значений видно, что дополнительная нагрузка распределяется между двумя источниками напряжения неравномерно {в разных долях}.
Однако желательно распределить изменение нагрузки между генераторами в зависимости от их рейтинга или некоторых других соображений.
Для этого нам нужен способ, позволяющий выполнить желательное автоматическое распределение нагрузки.
Это может быть достигнуто с помощью управления типа «ведущий – ведомый» или того, что обычно называют статическим управлением после управляющего регулятора синхронных машин.
3. Распределение мощности с контролем
Методы управления, используемые для распределения мощности, в целом можно разделить на две категории.
Первая категория представляет методы управления «ведущий – ведомый», которые были разработаны для распределения нагрузки между параллельно подключёнными источниками бесперебойного питания.
Вторая категория представляет методы управления по статизму {статическое регулирование}, которые больше подходят для распределения нагрузки между распределёнными энергетическими ресурсами (DER) в микроэнергосистемах. Краткое изложение обеих категорий представлено ниже.
3.1. Управление «ведущий − ведомый»
Многие методы распределения мощности в MG основаны на методах распределения нагрузки между параллельными источниками бесперебойного питания (ИБП). Большинство схем распределения нагрузки ИБП, полезных для микроэнергосистем, покрывается конфигурацией «мастер-слейв», показанной на рис. 2. Для автоматического распределения нагрузки один из источников (DER) определяется как ведущий (мастер), а все остальные переводятся в режим ведомых (слейв).
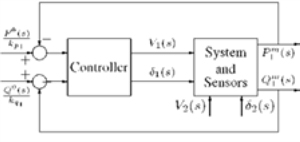
Рис. 2. Конфигурация ведущий-ведомый для распределения мощности
При изменении нагрузки потребления выходные параметры каждого DER будут изменяться, как это показано в предыдущем разделе.
В общем случае изменение выходных параметров DER не будет происходить желаемым путем, и, чтобы иметь контролируемое изменение, будет использована рассматриваемая структура ведущий-ведомый. Пусть новые выходные параметры ведущего {ведущего контроллера} равны P0 и Q0, тогда ведущий сообщает заданные значения (уставки) для всех остальных DER в виде:
kpi и kqi выбраны для контролируемого распределения изменения нагрузки.
Описанная выше подчинённая структура имеет множество вариаций, однако все они требуют линий связи {между ведущим и ведомыми} для работы (Vandoorn и др., 2013).
Далее мы рассмотрим методы распределения нагрузки, которые не требуют линий связи.
3.1. Статическое управление {управление по статизму}
В этом подразделе представлен метод статического управления распределением мощности при изменении нагрузки. Для инверторных источников генерации фазовый угол напряжения может определяться в соответствии с законом управления, проявляющимся в виде статизма. Например, фазовый угол δi должен быть уменьшен, если фактическая генерация превышает референсную (рекомендованную) нагрузку и наоборот. Ниже даны формулы 3 и 4 для расчёта управляющих воздействий на основе статизмов для контроллеров статического управления, представленных на рис. 3 и 4 (i = 1,2):
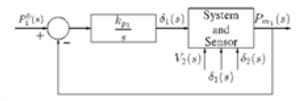
Рис. 3. Статическое управление распределением активной мощности
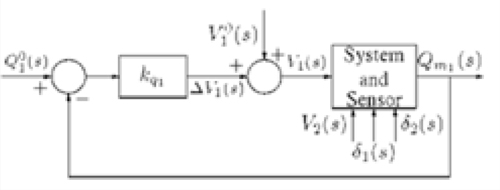
Рис. 4. Статическое управление распределением реактивной мощности
Для устойчивого управления необходимо, чтобы активная и реактивная мощности были такими, чтобы разность производных (то есть скоростей изменения) фазовых углов напряжения была равна нулю δ. 1 – δ. 2 = 0. Это гарантирует то, что при использовании закона управления (3), активная мощность распределяется обратно пропорционально {отклонению частоты или скорости изменения фазового угла напряжения с коэффициентом} kpi .
В стационарном состоянии изменение частоты системы равно δ. 1 = δ. 2 = Δω.
Статическое управление по (4) в координатах QV производит распределение изменения реактивной мощности, но это не приводит к пропорциональному распределению, поскольку зависит от параметров линий передачи.
Далее мы приводим анализ системы с двумя узлами с целью разработки схемы пропорционального статического распределения изменения реактивной мощности.
3.3. Соотношения мощностей для двухузловой системы
Выражение для полной мощности, входящей в узел, может быть записано как
Si = Pi + jQi = Vi∠δi × Ii∠ – φi, i = 1,2. (5)
Также
Подматрица Yij сформирована из проводимости между узлами YBus, объединяющими источник напряжения в узле '1' и шину нагрузки в узле '2'. Пусть Yredij = Gij + jBij, обозначим δij = δi – δj, и затем, рассматривая (5) и (6) совместно, получим:
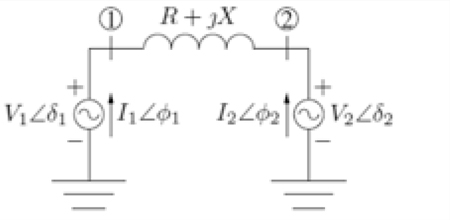
Рис.5. Двухузловая система
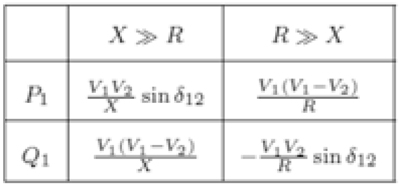
Двухузловая система Приведённые выше соотношения мощности (7) и (8) для двухузловой системы, показанной на рис. 5, могут быть записаны с учётом
в виде:

Соотношения мощности для специальных случаев.
4. Распределение реактивной мощности
Для MG с двумя источниками со статическим управлением, показанного на рис. 1, для компенсации изменения нагрузки в узле 3 ΔQ3 отношение изменений в узлах 1 и 2 соответственно ΔQ1 и ΔQ2 задаётся следующим образом:
 (13)
(13)
Выражение (13) ясно указывает на то, что распределение реактивной мощности с использованием простого статизма будет определяться соотношением проводимостей до источников. Это фундаментальное ограничение для использования управления QV по статизму. В дальнейшем мы обсудим, как преодолеть это ограничение, для того чтобы обеспечить желаемое пропорциональное распределение реактивной мощности.
В концепции виртуального импеданса (Он и Ли, 2011) предложен метод формирования искусственного сопротивления для распределения реактивной мощности и размещения резонансных фильтров гармонических составляющих тока. Схема управления (Он и Ли, 2011, рис. 11) показывает, как измеренный ток используется с блоком "Impedance" для синтеза виртуального сопротивления.
В работе Этемади и др. (2012 a, б) представлен дизайн децентрализованных робастных регуляторов для мульти-DER микросетей. Каждый DER представляет собой подсистему с полностью регулируемым источником напряжения и целью управления, задаваемой в виде модуля и фазового угла напряжения на PCC {контроллер}. Установки {настройки, уставки} для PCC по напряжению передаются из центральной системы, использующей функции анализа перетоков мощности {например, функции расчёта установившегося режима, оптимального режима, квазиустановившегося режима}.
В работе Zhong (2013) представлен контроллер робастного и статического управления для преимущественно резистивной сети, где реактивная мощность регулируется изменением разности фаз, а активная мощность – модулями напряжения. Пропорциональное разделение достигается так же, как в работе (17), представленной в Johnson и др., 2011.
Трудность точного распределения реактивной мощности по сравнению с распределением активной мощности между несколькими DER MG объясняется сложностью использования методов интегрального управления. Рассмотрим управление на основании статизмов (3) и (4). Система достигает равновесия только тогда, когда все δ. i равны, но та же система стабильна при множестве комбинаций ΔVi. Пропорциональность распределения реактивной мощности может быть достигнута только тогда, когда алгоритм управления может гарантировать равные значения всех ΔVi в новом равновесии.
Это возможно, но разработать алгоритмы управления, гарантирующие равенство приращений ΔV1 = ΔV2 =⋯= ΔVN, очень трудная задача. Одним из вариантов достижения решения является интегральное управление по форме:
ΔVi = ∫(ΔVi – ΔVcom)dt (14)
где: ΔVi = –kqi (Qmi– Qi 0) и ΔVcom должно быть изменением в предварительно выбранной общей точке MG. Отметим, что эта схема нуждается в наличии коммуникации между DER (рис. 6).
В работе Sao and Lehn (2005) закон управления имеет вид:
В соответствии с Johnson et al. (2011) пропорциональный член добавляется к закону управления (15):
В микросети с двумя источниками, рассматриваемой в данной статье, Vcom=V3.
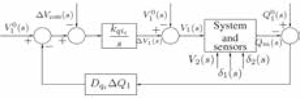
Рис. 6. Интегральное управление реактивной мощностью
Когда система устойчива, аргумент под интегралом в (17) должен быть равен нулю, при этом:
Vi 0 – Dqi Qi = Vcom (19)
Если напряжения Vi 0 одинаковы, то реактивная мощность распределяется обратно пропорционально Dqi. К тому же изменение напряжения для Vcom будет зависеть от значений Dqi. Для небольших изменений в Vcom, постоянные Dqi должны быть малы. Постоянные kqii определяют скорость реакции.
5. Управление для Microgrid с DER
Для DER в Microgrid существуют различные пути для определения Pi 0 и Qi 0, установившихся выходных значений активной и реактивной мощностей. В данной работе в качестве референсного (эталонного начального) значения используются напряжения из режима, предшествующего изменению нагрузки.
В работе Erickson и др. (2011) в качестве уставки по активной мощности принято значение мощности в линии постоянного тока системы PV. В работе Chiang и Chang (2001) схема виртуального импеданса вводится для достижения (а) баланса при распределении реактивной мощности и (б) распределения гармонических составляющих токов между многими источниками напряжения. Нелинейные нагрузки должны быть запитаны гармоническими токами, таким образом, требуется распределить необходимые гармонические токи поровну между различными источниками напряжения. В работе De Brabandere и др (2007) для управления предлагаются модифицированные активная и реактивная мощность Р'и Q'. В этой же статье также обсуждается использование виртуального импеданса для управления по статизму.
В будущих исследованиях необходимо рассмотреть вопросы как о динамике энергетических ресурсов, так и о динамических сенсорах для правильного проектирования контроллеров, работающих по статизму.
В работе Камель и др. (2013) ВЭУ скомбинированы с накопителем энергии для обеспечения выравнивания выходной мощности.
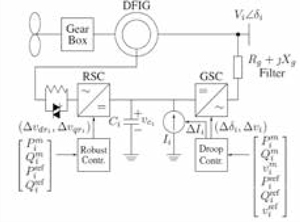
Рис. 7. DIFG и батарея
ВЭУ моделируется его динамическими уравнениями, но устройства накопления энергии смоделированы как идеальные источники постоянного тока. Задаваемая выходная мощность ВЭУ получается с использованием краткосрочного прогноза скорости ветра и управления углом наклона (тангаджа). Нечёткое (мягкое) управление используется для управления углом тангажа.
Робастные методы управления солнечной фотовольтаикой (Mahmud et al., 2012) и ветровой генерацией (Hossain et al., 2013) были предложены для передающих и распределительных систем (Roy и др., 2013). В данной работе эти алгоритмы робастного управления распространены на работу в рамках микроэнергосистем для присоединения накопителей и контроллеров, действующих по статизму, для каждого DER.
5.1. Управление электрическими машинами с двойным питанием и батареями накопителей энергии
Индукционный генератор с двойным питанием (DFIG) с батареей накопителей энергии (BES) показаны на рис. 7 (представлены как источник тока). Статическое управление и управление системой накопления энергии для DFIG достигнуты с использованием следующих законов управления (индекс m использован для измеренных величин и w – для обозначения ветровых турбин, положительность величины ΔIw является индикатором процесса заряда батареи).
 (20, 21, 22)
(20, 21, 22)
В общем уставкой Pw ref будет точка максимума мощности, прогнозируемая на основании ожидаемой скорости ветра.
Согласно (Хоссейн и др., 2013) Pw ref и Qw ref управляются с использованием робастных контроллеров.
Желаемые активная и реактивная мощности реализуются за счёт управления Iqr и Idr. Достижение уставки по реактивной мощности имеет более высокий приоритет, поэтому блок проверки проверяет доступную мощность для Iqr с большим предпочтением, чем для Idr для конвертора с 25-процентным рейтингом DFIG. Аккумулятор, показанный в качестве источника тока на рис. 7, заряжается и разряжается для поддержания напряжения на конденсаторе на заданном уровне.
5.2. Управление фотовольтаикой и батареями накопителей
Блоки фотовольтаики (PV-генераторы) с батареями (представлены как источники тока) показаны на рис. 8. Законы управления для фотовольтаики имеют вид (верхние индексы m использованы для обозначения измеряемых величин, индекс c – для обозначения напряжений на выходе конденсатора на выходе PV-генераторов, индексы p – для обозначения параметров на выходе инвертора):
 (23, 24)
(23, 24)
vc ref – формируется алгоритмом отслеживания точки максимальной мощности (ОТММ).
В основном Pp ref будет определена спрогнозированным максимальным значением, определённым на основании солнечного сияния, и Pp ref и Qp ref достигаются с использованием робастного управления (Mahmud и др., 2012). В режиме управления напряжением PV-генераторов, Pp и Qp обеспечиваются за счёт амплитуды напряжения на зажимах VSC. Ошибки регулирования Pp ref – Pp и Qp ref – Qp, поступающие на контроллер, преобразуются в продольные d и поперечные q составляющие тока инвертора в соответствии с заданными уставками, далее выходные данные инвертора снова обрабатываются, чтобы получить новые компоненты уставок. Батарея, показанная на рис. 8, заряжается и разряжается для сохранения напряжения на конденсаторе на уровне vdc ref.
Значения указанных выше параметров kIw, kδw, kqw, kIp, kδp определяются путём минимизации интегральной ошибки функции стоимости, которая обеспечивает устойчивость системы с минимальными отклонениями в установившемся режиме. Функция затрат задается как:
 (25),
(25),
где: t0 и tf – начальная и конечная временные точки периода вычисления управляющего воздействия, W – весовая матрица {определяющая цену отклонения} и E=[Δvdcw,ΔPw,ΔQw,Δvdcp,ΔPw] – матрица абсолютных ошибок управления; ΔP и ΔQ представляют ошибки управления – разности между активной и реактивной уставками и измеряемыми значениями мощности, и Δvdc – отклонение напряжения от его номинальной величины. Функционирование запроектированного контроллера в течение островного режима представлено в следующем разделе.
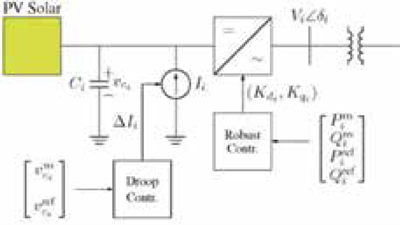
Рис. 8. PV и батарея
6. Оценка эффективности управления
Для оценки эффективности управления производились испытания MG (Katiraei и др., 2005). {Испытываемый} MG состоит из трёх 13,8-кВ фидеров, которые подключены к сети энергосистемы через радиальную линию 69 кВ. Общая нагрузка MG составляет 7,3 МВт и 3,97 МВАр.
PV-генерация подключается к MG через VSC. Статор DFIG подключён непосредственно к сети MG, ротор – через VSC. Номинальная мощность PV-генератора равна 3,0 МВт, DFIG – 3,5 МВт. Оба агрегата, PV-генератор и DFIG, подключены к системе батарей накопителя энергии. Номинальная ёмкость каждой батареи составляет 0,6 МВтч. Напряжение связи постоянного тока – 1200 В, электрическая ёмкость конденсатора – 10 000 микрофарад. Пятьсот шестьдесят два 2,135-вольтовых свинцово-кислотных аккумуляторов соединены последовательно, чтобы получить желаемое напряжение. Максимальные токи заряда или разряда – 5 кА. Каждая линия электропередачи MG представлена последовательно соединёнными ветвями с сосредоточенными активным и индуктивным сопротивлениями {RL-ветвь}. В островном режиме оставшаяся в балансе MG мощность 1 МВт питается от BES.
Весовая матрица в (25) определена как [0.5,1.0,1.0,0.5,1.0]. Полученные параметры управления для ветротурбин kIw=13,25, kδw=8, kqw=20 и для фотоэлектрического блока k Ip=5, kδp=30. Контроллеры статического управления настроены на работу в первую очередь, а уже динамика их действия вводится в контур робастного контроллера.
Первоначально MG работает параллельно с сетью энергосистемы и функционирование разработанного контроллера исследуется в режиме, предшествующем островному. Через одну секунду осуществляется намеренное отделение острова на автоматических выключателях линии 69 кВ и батареи включаются в действие таким образом, что они поддерживают оставшуюся в балансе мощность в 1 МВт. На рис. 9 и 10 показана выходная активная мощность накопителя энергии батареи (BES). Генератор ветра и PV-генератор продолжают работать в их оптимальном режиме. Выходная активная мощность PV-генератора представлена на рис. 11, совместная выходная мощность PV-генератора и BES показана на рис. 12.
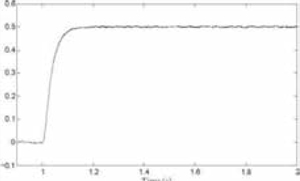
Рис. 9. График активной мощности BES

Рис. 10. График напряжения на выводах PV-генератора в процессе выделения MG в островной режим
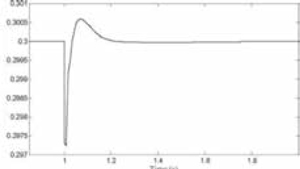
Рис. 11. График активной мощности PV-генератора в процессе выделения MG в островной режим
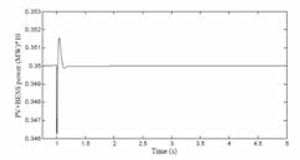
Рис. 12. График суммарной активной мощности PV-генератора и
BES в процессе выделения MG в островной режим.
Оба DER-блока управляют реактивной мощностью для поддержания напряжения на выводах. Возмущение напряжения, связанное с переходным режимом, устраняется регулятором напряжения. И фазовый угол, и модуль регулируемого напряжения быстро модулируются предлагаемым контроллером для того, чтобы устранить возмущения напряжения и угла мощности. Демпфирование, обеспечиваемое робастным контроллером распределения мощности, даёт хорошее затухание. Из этого исследования ясно, что предложенный контроллер может обеспечить устойчивость и затухающие переходные характеристики во время переключения MG с параллельной работы в островной режим.
7. Заключение
Для идеальных источников напряжения, подключаемых к MG через инвертор, статическое управление {управление по статизму} может помочь в распределении активной и реактивной мощности. Конструкция управления проста благодаря ограниченному количеству датчиков {сенсоров} и контроллеру динамического взаимодействия. Вызов состоит в том, чтобы учесть динамику генерации и нагрузки с их системами управления и гарантировать устойчивую работу MG в островном режиме. Системы накопления энергии могут быть использованы для поддержки DЕRs для обеспечения устойчивости MG при больших возмущениях за счёт робастного управления и для достижения эффективного распределения мощности средствами управления по статизму.

